弶怱幰偺偨傔偺僼儔僀僩僔儈儏儗乕僞擖栧妛峑
|
COMPUTER丂PILOT丂ACADEMIY
|
|
5.僆僾僔儑儞島嵗

寁婍旘峴偺婎杮偼丄昗幆偺側偄嬻傪栚揑抧傑偱娫堘傢側偄傛偆偵旘傫偱峴偔偨傔偵偼丄峲朄偑昁梫偱偡丅
崱傑偱妛傫偱偒偨旘峴孭楙偼峲朄偱尵偆偲丄桳帇奅旘峴偱乽寶暔乿丄乽愳乿丄乽嶳乿丄側偳乽栚昗暔乿傪尒偮偗偰婰壇偟旘峴偡傞偙偲偱偡
丅 偙偺峲朄偱偼丄乽揤岓偺埆偄擔乿丄乽栭娫乿丄乽戝奀尨乿傪旘峴偡傞偙偲偑偱偒傑偣傫丅乮偙傟傪乽抧暘峲朄乿偲偄偄傑偡丅乯
偦偙偱丄乽峲朄憰抲乿偲乽寁婍乿傪巊偭偰廃埻偺條巕偑傢偐傜側偔偰傕丄栚揑抧傑偱旘峴偡傞偙偲傪壜擻偵偟偨偺偱偡丅
壗傗傜擄偟偦偆偱偡偑丄尨棟尨懃偼娙扨偱偡丅偙傟傜傪棟夝偟偰偄偨偩偗傟偽丄戝宆椃媞婡偱偺挿嫍棧旘峴傕柌偱偼偁傝傑偣傫丅
亙儘乕僇儖僄儕傾僫價僎乕僔儑儞亜
乽儘乕僇儖僄儕傾乿偲偼嬻峘晅嬤偱尒捠偟嫍棧乮悈暯慄傑偱偺嫍棧乯埲撪偱崅惛搙偺寁婍桿摫偑弌棃傞斖埻傪偄偄傑偡丅
乽儘乕僇儖僄儕傾丂僫價僎乕僔儑儞乿偵偼俁庬椶偺僩儔僢僉儞僌偑偁傝傑偡丅
嘆倁俷俼嬊僩儔僢僉儞僌
嘇俬俴俽嬊僩儔僢僉儞僌
嘊恑擖妏巜帵摂(VASIS枖偼俹俙俹俬乯僩儔僢僉儞僌
亙柍曽岦惈柍慄昗幆亜
亙挻抁攇慡曽岦幃柍慄昗幆偲嫍棧應掕憰抲亜
寁婍旘峴偺婎杮偼丄昗幆偺側偄嬻傪栚揑抧傑偱娫堘傢側偄傛偆偵旘傫偱峴偔偨傔偵偼丄峲朄偑昁梫偱偡丅
崱傑偱妛傫偱偒偨旘峴孭楙偼峲朄偱尵偆偲丄桳帇奅旘峴偱乽寶暔乿丄乽愳乿丄乽嶳乿丄側偳乽栚昗暔乿傪尒偮偗偰婰壇偟旘峴偡傞偙偲偱偡
丅 偙偺峲朄偱偼丄乽揤岓偺埆偄擔乿丄乽栭娫乿丄乽戝奀尨乿傪旘峴偡傞偙偲偑偱偒傑偣傫丅乮偙傟傪乽抧暘峲朄乿偲偄偄傑偡丅乯
偦偙偱丄乽峲朄憰抲乿偲乽寁婍乿傪巊偭偰廃埻偺條巕偑傢偐傜側偔偰傕丄栚揑抧傑偱旘峴偡傞偙偲傪壜擻偵偟偨偺偱偡丅
壗傗傜擄偟偦偆偱偡偑丄尨棟尨懃偼娙扨偱偡丅偙傟傜傪棟夝偟偰偄偨偩偗傟偽丄戝宆椃媞婡偱偺挿嫍棧旘峴傕柌偱偼偁傝傑偣傫丅
5.1. 峲朄偺庬椶
亙帴婥曽埵乮僐儞僷僗乯偵傛傞峲峴亜 |
fig-5.1偺傛偆偵丄乽棧棨偡傞曽岦乿偲乽栚揑抧偺曽岦乿傪寛傔傑偡丅 師偵丄栚揑抧傪峲峴偡傞梊掕懍搙傪寛傔丄摓拝帪娫傪妱傝弌偟傑偡丅 偁偲偼丄峲嬻婡偺僐儞僷僗偩偗傪棅傝偵忈奞暔偺側偄崅搙傑偱忋徃偟偰栚揑偵岦偄傑偡丅乮偙傟傪乽悇應峲朄乿偲偄偄傑偡乯 乽暅楬乿偼丄乽墲楬乿偺媡乮180亱斀揮曽岦乯偱旘峴偟傑偡丅 偟偐偟丄幚嵺偼晽偺塭嬁乮墶晽丄捛偄晽丄岦偐偄晽乯偲僐儞僷僗偺岆嵎乮廃埻偺嬥懏偺塭嬁傪庴偗傞丅乯側偳偺忈奞偑偁傝傑偡丅 偟偨偑偭偰丄憡摉側嬤嫍棧偱偁傞偙偲偲乽抧暥峲朄乿傪暪梡偟側偗傟偽巊偄暔偵偼側傝傑偣傫丅 栚揑抧偵拝偄偰傕妸憱楬偑尒偊側偄偲拝棨偱偒傑偣傫丅 偟偨偑偭偰丄峲朄偲偟偰偼僶僢僋傾僢僾揑梡搑偱偟偐巊梡弌棃側偄偺偱偡偑昁偢妎偊偰偔偩偝偄丅 嬞媫帪丄偦偺昁梫惈偑傢偐傞敜偱偡丅 |
| fig-5.1 | |
亙揹攇峲朄僫價僎乕僔儑儞偵傛傞峲峴亜
揹攇峲朄偼乽旘峴婡偺寁婍乿偲乽抧忋偺墖彆巤愝乿傪巊偭偰栚揑抧扝偭偰偄偔僔僗僥儉傪偄偄傑偡丅
亙姷惈峲朄憰抲乮俬俶俽乯亜
尨棟偼丄僕儍僀儘偲壛懍搙寁偱乽曽妏乿偲乽壛懍搙乿傪専弌偟丄僐儞僺儏乕僞偱愊暘偡傞偙偲偱堏摦偟偨嫍棧偑傢偐傝傑偡丅
嵟弶偵尰嵼埵抲傪擖椡偡傟偽丄埆揤岓傗揹攇朩奞偺塭嬁傪庴偗偢丄乽埵抲乿偲乽懍搙乿傪忢偵寁嶼偟偰攃埇偱偒傑偡丅
偟偐偟丄挿偄嫍棧傪堏摦偡傞偲岆嵎偑椵愊偝傟偰戝偒偔側傞偲偄偆寚揰偑偁傝傑偡丅
尰嵼偺峲朄偼乽僼儔僀僩丒儅僱僕儊儞僩丒僔僗僥儉乮FMS乯乿傪巊偭偰乽姷惈峲朄憰抲乮俬俶俽乯乿偲乽峲朄墖彆憰抲乮navigation aid system乯乿傪暪梡偟偰旘峴偟偰偄傑偡丅
亙慡抧媴應埵僔僗僥儉乮GPS乯亜
乽俧俹俽乿偼塹惎傪棙梡偟偨惛枾塹惎峲朄僔僗僥儉偱偡丅
抧媴傪廃夞偡傞4屄埲忋偺塹惎傪慖戰偟丄怣崋傪庴怣偟嶰師尦偱埵抲傪抦傞偙偲偑偱偒傑偡丅
GPS偺棙梡偵傛傝峲嬻婡偼棧棨偐傜拝棨傑偱扨堦偺峲朄墖彆憰抲偱旘峴偱偒傑偡丅
亙僄儕傾峲朄偺乽峲朄墖彆憰抲乮navigation aid system乯乿亜
僄儕傾峲朄偵偼乽儚僀僪丂僄儕傾僫價僎乕僔儑儞乿偲乽儘乕僇儖丂僄儕傾僫價僎乕僔儑儞乿偺擇偮偺懆偊曽偑偁傝傑偡丅
5.2.峲朄墖彆憰抲
亙儚僀僪僄儕傾丂僫價僎乕僔儑儞亜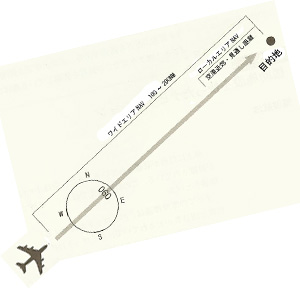 |
偦偺柤偺偲偍傝峀偄乮墦偄乯僄儕傾傪僇僶乕偡傞偨傔偺峲朄憰抲偱偡丅 斖埻偵偟偰100NM乣200NM乮185Km乣370Km掱搙乯偺嫍棧傪僇僶乕偟傑偡丅 偙偺僫價僎乕僔儑儞偵偼俀庬椶偺栚揑抧傊偺恑傔曽偑偁傝傑偡丅 嘆俶俢俛(柍巜岦惈柍慄昗幆)僩儔僢僉儞僌 嘇倁俷俼(挻抁攇慡曽岦幃柍慄昗幆)僩儔僢僉儞僌 乮儘乕僇儖僄儕傾偱傕巊偄傑偡丅乯 |
| fig-5.2 |
亙儘乕僇儖僄儕傾僫價僎乕僔儑儞亜
乽儘乕僇儖僄儕傾乿偲偼嬻峘晅嬤偱尒捠偟嫍棧乮悈暯慄傑偱偺嫍棧乯埲撪偱崅惛搙偺寁婍桿摫偑弌棃傞斖埻傪偄偄傑偡丅
乽儘乕僇儖僄儕傾丂僫價僎乕僔儑儞乿偵偼俁庬椶偺僩儔僢僉儞僌偑偁傝傑偡丅
嘆倁俷俼嬊僩儔僢僉儞僌
嘇俬俴俽嬊僩儔僢僉儞僌
嘊恑擖妏巜帵摂(VASIS枖偼俹俙俹俬乯僩儔僢僉儞僌
5.3.儚僀僪僄儕傾僫價僎乕僔儑儞偺夝愢
亙柍曽岦惈柍慄昗幆亜
 |
傕偭偲傕億僺儏儔乕側挿嫍棧寁婍峲朄偱丄旘峴婡偺乽帺摦曽岦扵抦婍乮俙俢俥乯乿偲丄抧忋墖彆巤愝偱乽柍曽岦惈柍慄昗幆乮俶俢俛乯乿傪巊偭偰栚揑抧傑偱旘峴偟傑偡丅 |
| fig-5.3.1丂俙俢俥僎乕僕 |
|
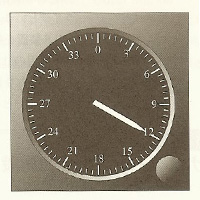
帺摦曽岦扵抦婍 乮俙俢俥乯 |
俶俢俛偺揹攇偑偳偺曽岦偐傜棃傞偺偐傪360搙偱昞帵偟傑偡丅 偁傜偐偠傔丄栚揑偺俶俢俛偺廃攇悢傪僙僢僩偟偰丄棧棨屻丄俙俢俥僎乕僕偺帵偡曽岦偵婡庱曽埵傪桿摫偟偰偄偒傑偡丅 |
| 柍曽岦惈柍慄昗幆 乮俶俢俛乯 |
廃攇悢懷200乣400KHz偺傪巊偄傑偡丅挻抁攇慡曽岦幃柍慄昗幆乮倁俷俼乯偵斾傋偰惛搙偼掅偄偑桳岠斖埻偼100乣200NM偲挿嫍棧傪僇僶乕偱偒傑偡丅 栚揑抧偵摓払乮捠夁乯偡傞偲丄僎乕僕偺巜恓偑180亱斀揮偡傞偺偱俶俢俛價乕僐儞晅嬤傪捠夁偟偨偙偲偑傢偐傝傑偡丅 偟偐偟丄崙撪偱偼俶俢俛嬊偼師戞偺尭彮偟偰偍傝丄偙傟偐傜儘乕僇儖僄儕傾僫價僎乕僔儑儞偱徯夘偡傞挻抁攇慡曽岦幃柍慄昗幆乮倁俷俼乯偺拞宲偑揹攇峲朄偺庡棳偵側偭偰偄傑偡丅 |
亙挻抁攇慡曽岦幃柍慄昗幆偲嫍棧應掕憰抲亜
|
摿偵嬻峘嬤偔偺倁俷俼嬊偵偼俢俵俤嬊偑暪愝偝傟偰偄傑偡丅 偙傟偼嬻峘偵嬤偯偔偨傔倁俷俼嬊傑偱偺嫍棧傪嫵偊惓妋側僫價僎乕僔儑儞傪墖彆偟偰偔傟傑偡丅
|
||||||||||||
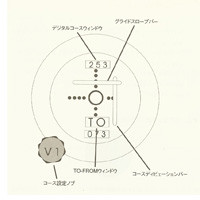
| fig-5.3.2 倁俷俼僎乕僕 乮僆儉僯儀傾儕儞僌寁俷俛俬丗Omni乯 |
| 挻抁攇慡曽岦幃柍慄昗幆 乮倁俷俼乯 |
倁俫俥丂俷倣倳値倝-Directional丂倰倕倓倝倧丂Renge偲偄偄丄尰嵼傕偭偲傕懡偔巊傢傟偰偄傞峲朄墖彆巤愝丅 108乣118Mz懷偺廃攇悢傪巊梡偟傑偡丅桳岠巊梡斖埻偼尒捠偟乮悈暯慄傑偱乯嫍棧 |
| 嫍棧應掕憰抲 (俢俵俤乯 |
嬊偲峲嬻婡偺憡屳偺嫍棧傪應掕偡傞憰抲偱偡丅 乽抧忋懁偺僩儔儞僗億儞僟乮transponder乯乿偲乽峲嬻婡懁偺僀儞僞儘僎乕僞乮interrogator乯乿偑堦懳偱嶌摦偟傑偡丅 峲嬻婡偱偼偙偺擇偮偺揹攇偺帪娫嵎傪應掕偟偰嫍棧傪媮傔傑偡丅 捠忢偼VOR偲暪愝偝傟丆曽埵偲嫍棧傪媮傔傜傟傞傛偆偵側偭偰偄傞丅 傑偨丄栚揑抧摓払抧揰偱偺俢俵俤偺嫍棧昞帵偼乭侽乭乮僛儘乯偵偼側傝傑偣傫丅 偙傟偼丄旘峴婡偺崅搙偑偁傞偨傔偱俢俵俤嬊偲峲嬻婡偺崅搙嵎偑昞帵偝傟傑偡丅 墦偞偐傞偵楢傟偰傑偨嫍棧偑憹偊偰偄偒傑偡丅 |
5.4.儘乕僇儖僄儕傾僫價僎乕僔儑儞偺愢柧
|
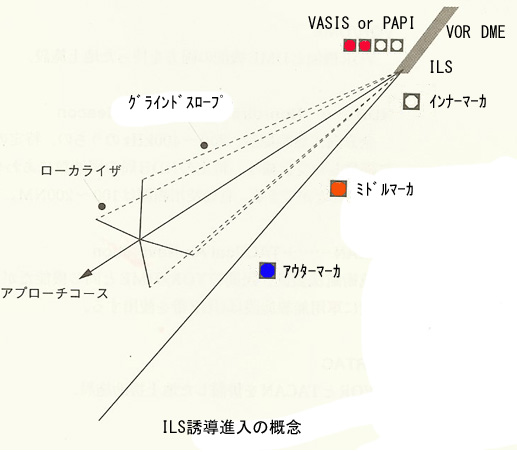
fig-5.4偺傛偆偵丄嬻峘嬤峹偵嬤偯偔偲抧忋墖彆巤愝偐傜敪怣偡傞揹攇傪巊偄拝棨妸憱楬偺曽岦傊桿摫偝偣傑偡丅 桿摫撪梕偼丄乽僼傽僀僫儖傾僾儘乕僠偺曽岦乿偲乽僌儔僀僪僗儘乕僾崅搙乿傪桿摫偟傑偡丅 |
| fig-5.4.1丂儘乕僇儖僄儕傾僫價僎乕僔儑儞 |
| 挻抁攇慡曽岦幃柍慄昗幆 乮倁俷俼乯 | 嵟廔偺栚揑抧偺嬊偱偡丅 乮巟墖曽朄偼儚僀僪僄儕傾丂僫價僎乕僔儑儞偲嫟捠偱偡丅乯 |
| 嫍棧應掕憰抲 乮俢俵俤乯 | 嬻峘傑偱偺嫍棧傪帵偟傑偡丅 偙偺庴怣偐傜崀壓偟僼傽僀僫儖傾僾儘乕僠傑偱偺崅搙傪専摙偟傑偡丅 乮俢俵俤偑側偄応崌偼丄傾僾儘乕僠儅僢僾偱偺悇應峲朄偲側傝傑偡乯 乮巟墖曽朄偼儚僀僪僄儕傾丂僫價僎乕僔儑儞偲嫟捠偱偡丅) |
| 寁婍拝棨憰抲 乮俬俴俽乯 | 僼傽僀僫儖傾僾儘乕僠偺桿摫傪偟偰偔傟傑偡丅 僼傽僀僫儖傾僾儘乕僠偵擖偭偨峲嬻婡偵懳偟偰乽巜岦惈揹攇乿傪敪怣偟丄妸憱楬傊偺恑擖僐乕僗傪巜帵偡傞憰抲偱偡丅 憰抲偼埲壓偺傛偆偵峔惉偝傟偰偄傑偡丅
|
| 惛枾恑擖宱楬巜帵摂 乮俹俙俹俬乯 |
俬俴俽偑側偄応崌乮傑偨偼丄俬俴俽偲偺暪梡乯偼丄妸憱楬榚偵桿摫昞帵摂傪庢晅偗丄偙偺昞帵摂傪棅傝偵崀壓丒拝棨傪帋傒傑偡丅 恑擖妏傪昞帵摂偱巜帵偡傞憰抲偱丄僌儔僀僪僷僗偺崅偝傪栚帇偱妋擣偱偒傑偡丅 fig-5.4偺傛偆偵墶偵4楍偺昞帵摂偑暲傃乽愒丂俀摂乿偲乽敀丂2摂乿偱僌儔僀僪僗儘乕僾忋傪崀壓偺桿摫傪偟偰偄傑偡丅 愒4摂偼掅偡偓丄敀4摂偼崅偡偓偱偡丅 僀儞僫乕儅乕僇乮儈僪儖儅乕僇偺応崌傕偁傞乯偱丄僆乕儖愒傑偨偼僆乕儖敀偱偁傟偽拝棨傗傝捈偟乮僑乕傾儔僂儞僪乯偱偡丅 |
| *1乽恑擖儅乕僇乿偺庬椶 | |
| 傾僂僞乕儅乕僇乮惵乯 |
巜掕崅搙乮僼傽僀僫儖傾僾儘乕僠捈慜偺崅搙乯偱僌儔僀僪僗儘乕僾奐巒揰傪偄偄傑偡丅 乽俬俴俽桿摫乿僼傽僀僫儖傾僾儘乕僠偺奐巒偱偡丅 |
| 儈僪儖儅乕僇乮烌乯 | 偙偺儅乕僇偼拝抧寛怱揰傛傝+200僼傿乕僩偵偁傝傑偡丅 帺摦拝棨憰抲偑偮偄偰偄傞嬻峘偱偼丄僇僥僑儕乮俠俙俿*2乯偵傛偭偰掕傔傜傟偰偄傑偡丅 揤岓忦審乮妸憱楬偑尒偊側偄応崌乯偵傛偭偰僑乕傾儔僂儞僪傑偨偼拝棨拞巭偲側傝傑偡丅 |
| 僀儞僫乕儅乕僇乮敀乯 | 拝抧寛怱揰偱偡丄偙偺揰傪墇偊偰僑乕傾儔僂儞僪偼弌棃傑偣傫丅 壗偑壗偱傕拝棨偟側偗傟偽側傝傑偣傫丅 |
| *2 僇僥僑儕乕乮俠俙俿乯偺愢柧 | |
| 埆揤岓偱傕埨慡妋幚偵拝棨偱偒傞偙偲傪栚揑偲偟偨帺摦拝棨憰抲偑愝抲偝傟偰偄傞嬻峘偑憹偊偰偄傑偡丅 崙嵺柉娫峲嬻婡娭乮ICAO乯偱偼乽慡揤岓拝棨憰抲乮all weather landing system乯乿偺奐敪傪抜奒揑偵悇恑偟偰偄偔偨傔5偮偺僇僥僑儕乕乮倖倝倗-5.4.2乯傪愝掕偟偰偄傑偡丅 |
|

|
|
| fig-5.4.2 | |